Publications
Selected research on medical imaging, ultrasound robotics, and learning-based perception.
7
Publications
2
Selected
2025
Latest year
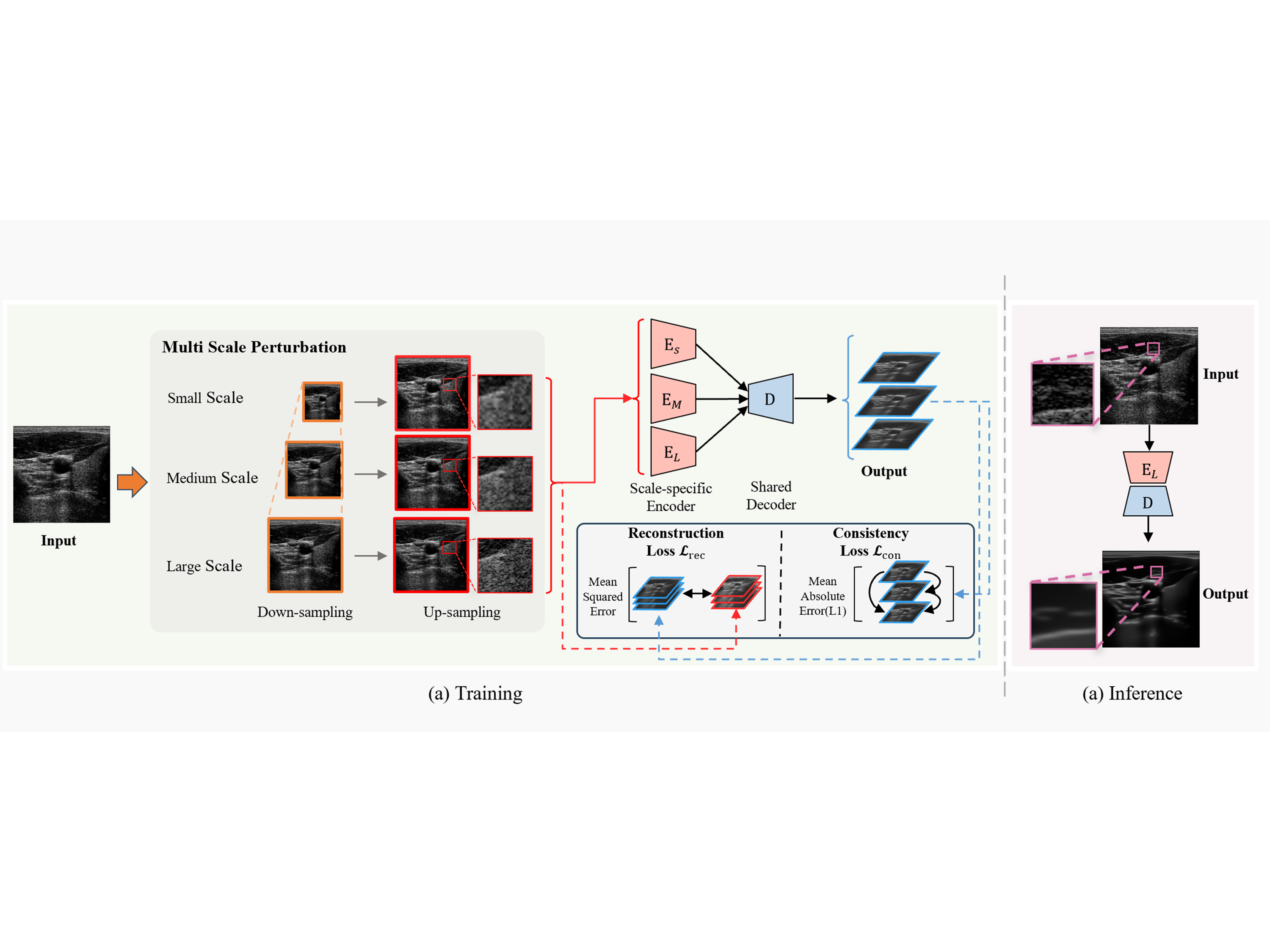
Speckle2Self: Self-supervised ultrasound speckle reduction without clean data
Xuesong Li, Nassir Navab, Zhongliang Jiang†
Medical Image Analysis 2025
A novel self-supervised speckle reduction method in ultrasound imaging via multi-scale perturbations transformation, enabling effective despeckling without clean reference data.
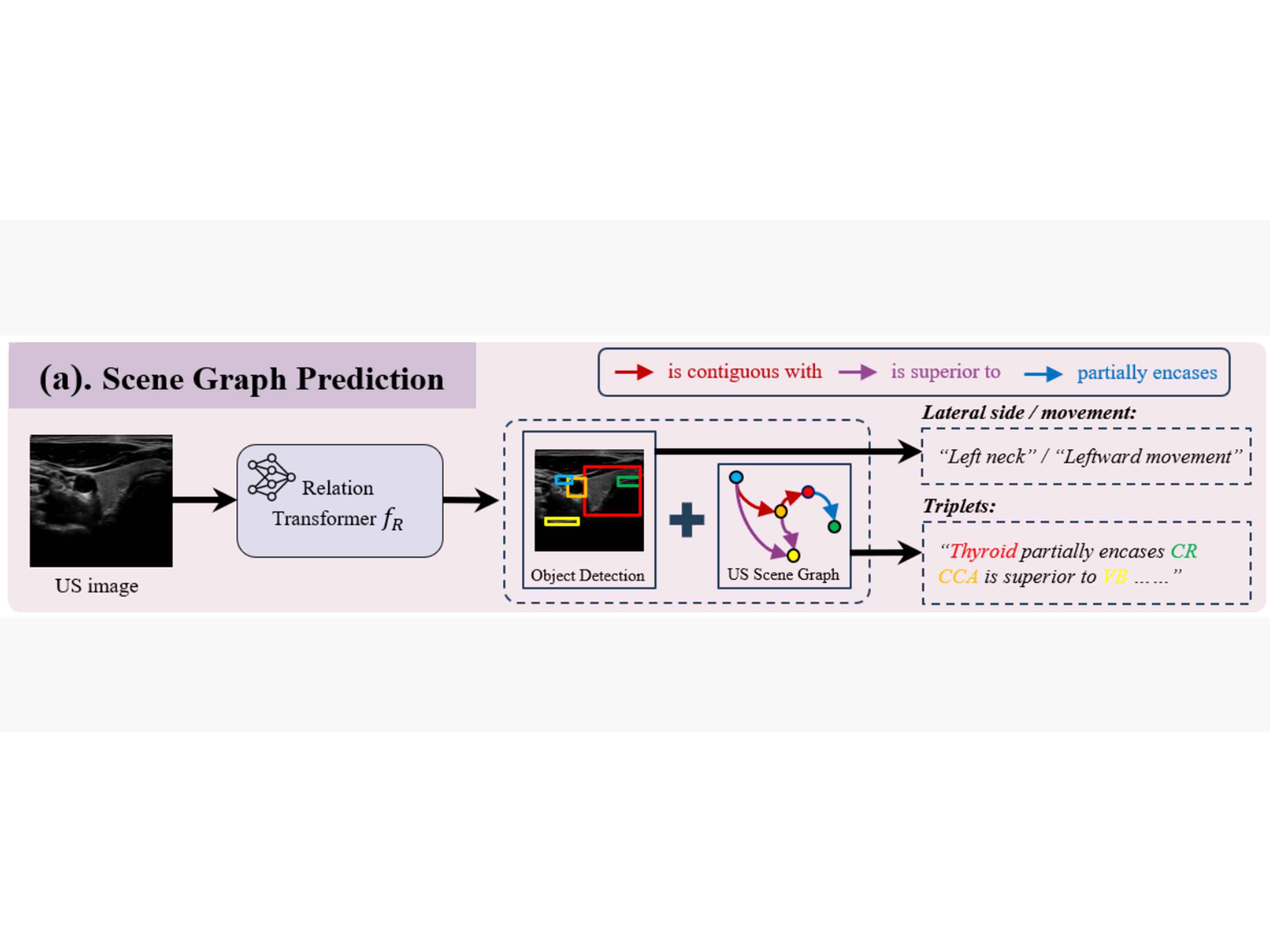
Semantic scene graph for ultrasound image explanation and scanning guidance
Xuesong Li, Dianye Huang, Yameng Zhang, Nassir Navab, Zhongliang Jiang†
International Conference on Medical Image Computing and Computer-Assisted Intervention (MICCAI) 2025
A novel approach to ultrasound image analysis using semantic scene graphs for improved explanation and guidance during scanning procedures.
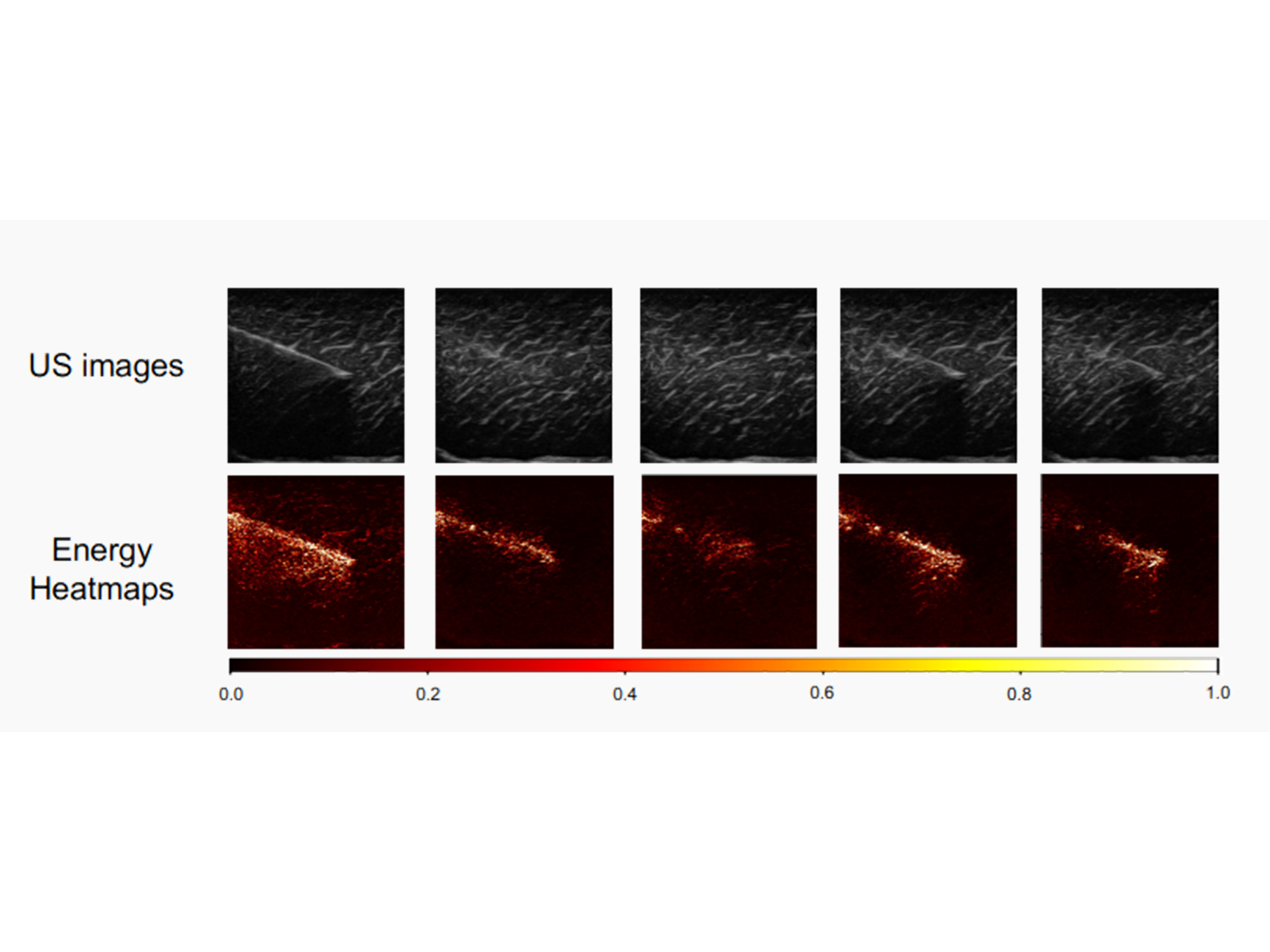
Vibration-Based Energy Metric for Restoring Needle Alignment in Autonomous Robotic Ultrasound (IROS 2025)
Zhongyu Chen, Chenyang Li, Xuesong Li, Dianye Huang, Zhongliang Jiang, Stefanie Speidel, Xiangyu Chu†, KW Samuel Au
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
A novel approach for restoring needle alignment in autonomous robotic ultrasound using vibration-based energy metrics.
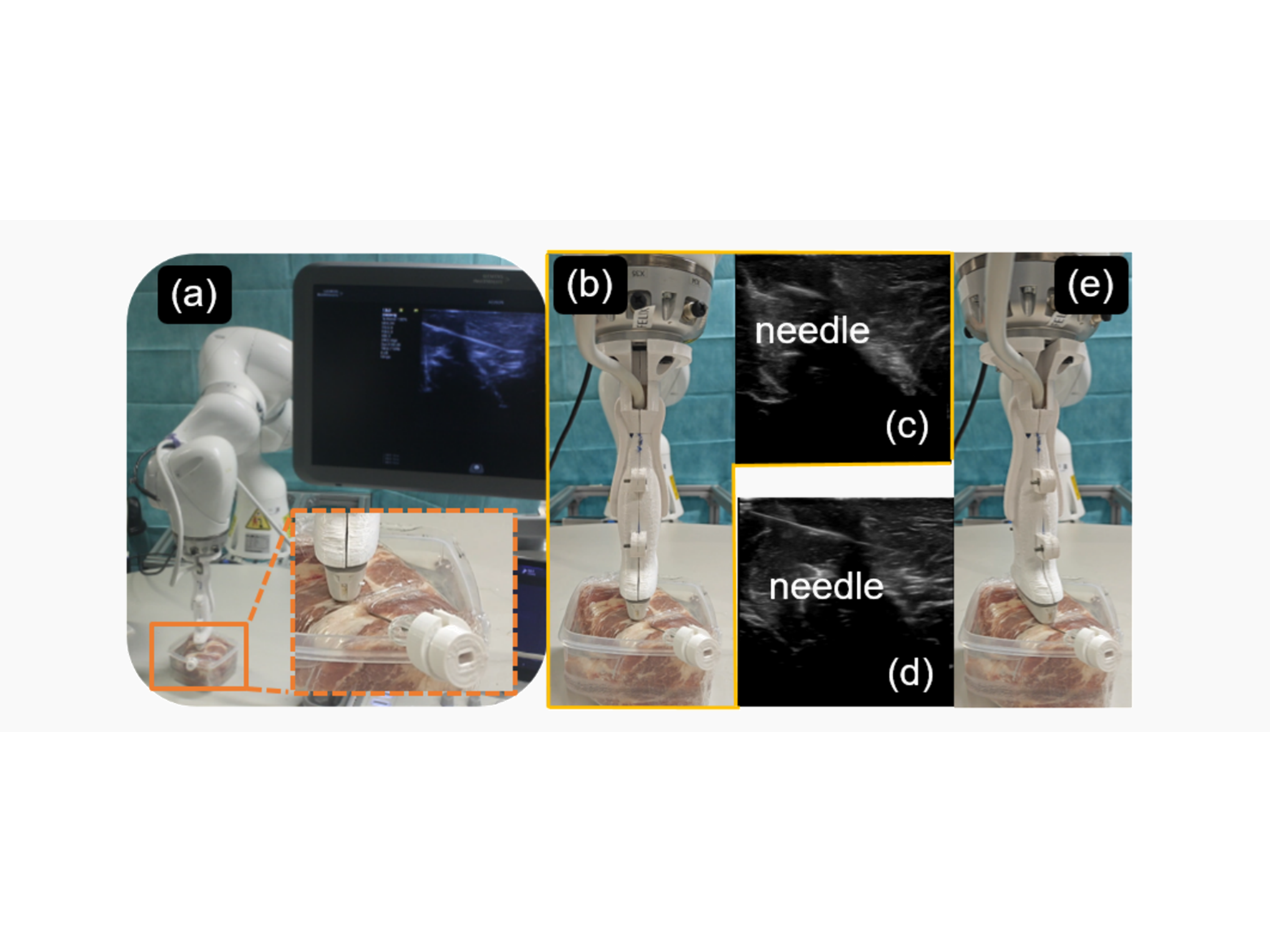
Needle segmentation using gan: Restoring thin instrument visibility in robotic ultrasound
Zhongliang Jiang, Xuesong Li, Xiangyu Chu†, Angelos Karlas, Yuan Bi, Yingsheng Cheng†, KW Samuel Au, Nassir Navab
IEEE Transactions on Instrumentation and Measurement 2024
A novel GAN-based approach for accurate needle segmentation in robotic ultrasound, enhancing visibility of thin instruments during procedures.
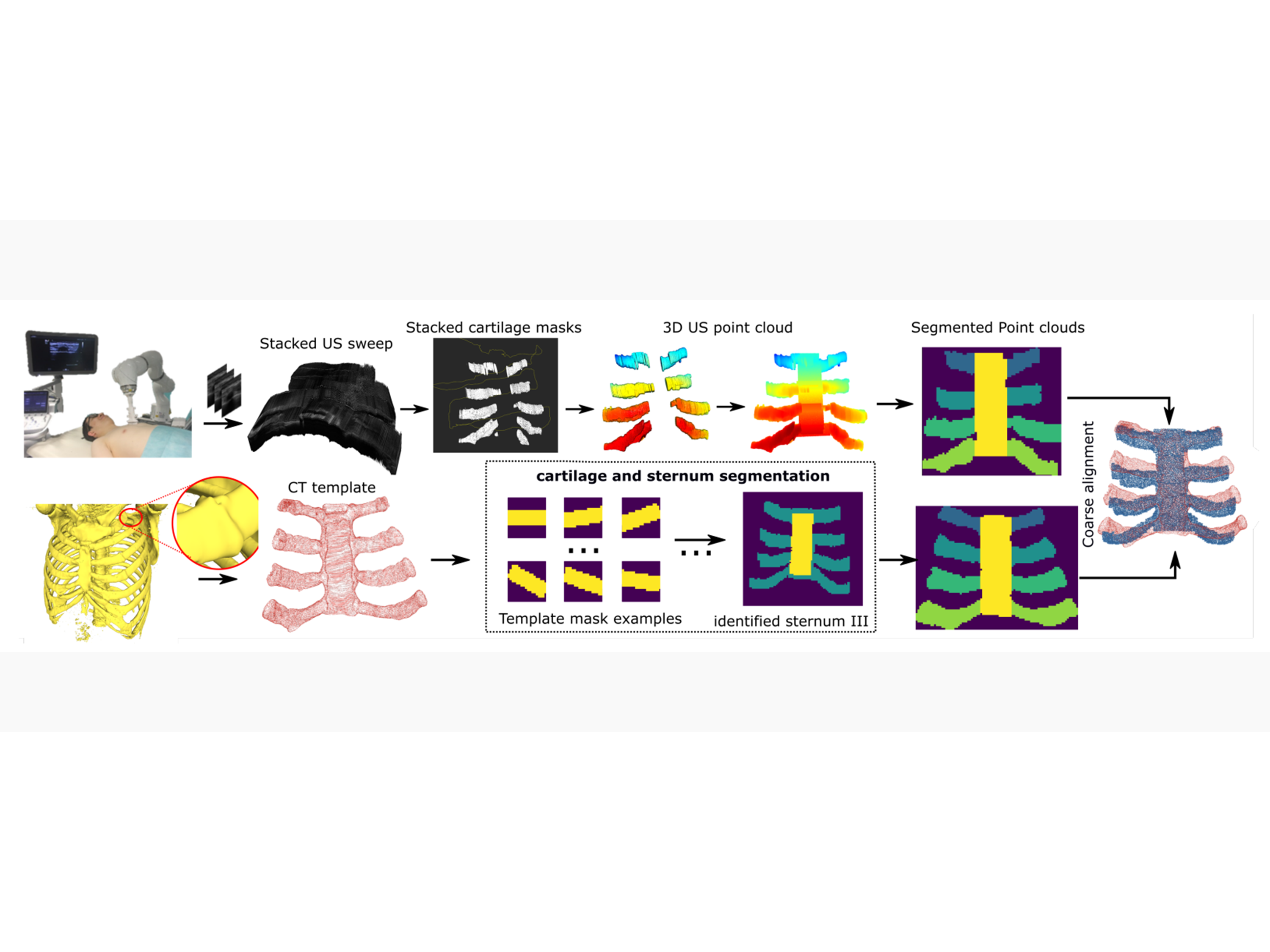
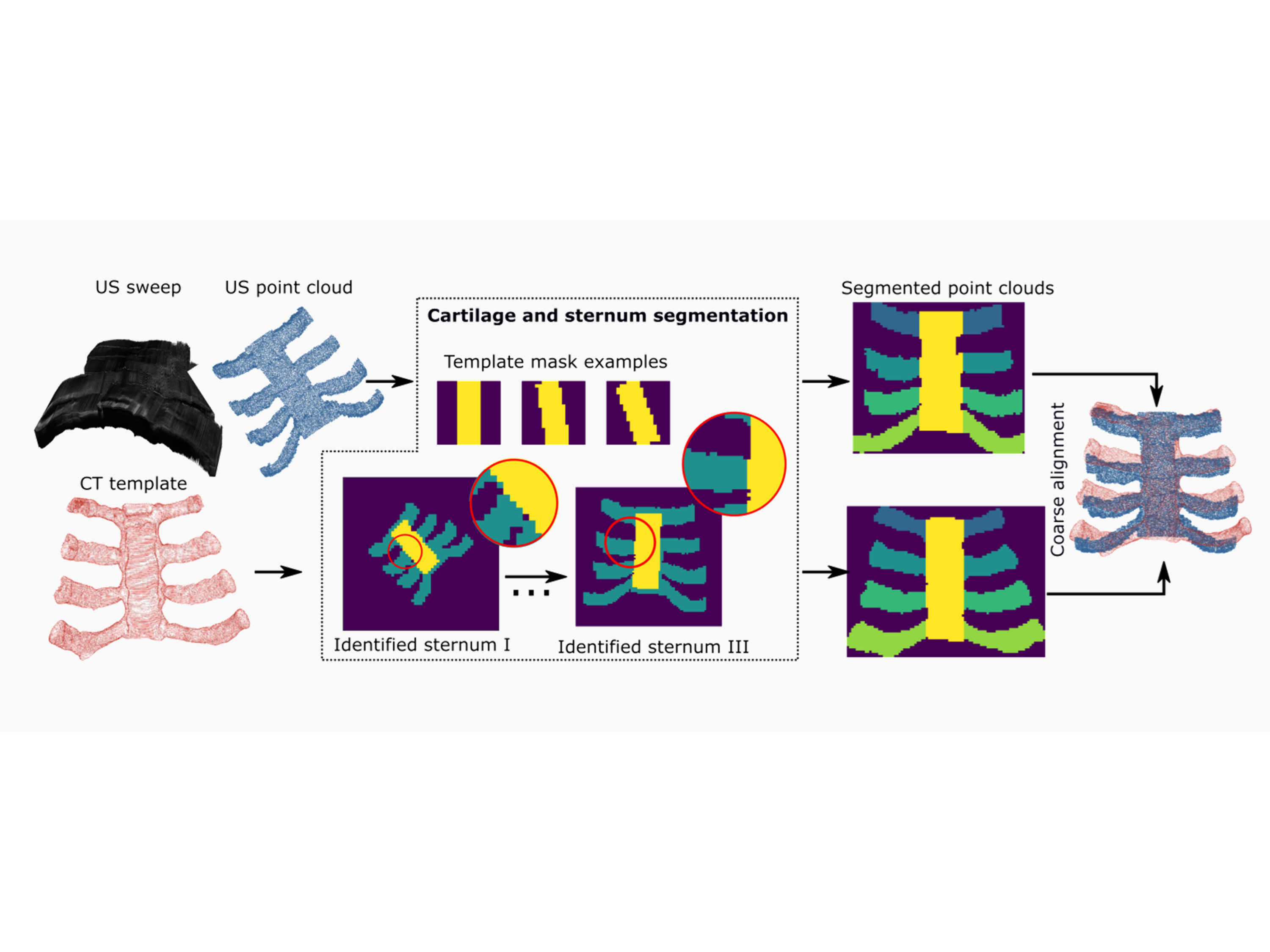
Class-aware cartilage segmentation for autonomous US-CT registration in robotic intercostal ultrasound imaging
Zhongliang Jiang†, Yunfeng Kang, Yuan Bi, Xuesong Li, Chenyang Li, Nassir Navab
IEEE Transactions on Automation Science and Engineering 2024
A class-aware cartilage segmentation method for enhancing autonomous ultrasound-CT registration in robotic intercostal imaging.
Thoracic cartilage ultrasound-ct registration using dense skeleton graph
Zhongliang Jiang†, Chenyang Li, Xuesong Li, Nassir Navab
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023
A dense skeleton graph-based method for thoracic cartilage ultrasound-CT registration, improving accuracy and robustness in interventional procedures.
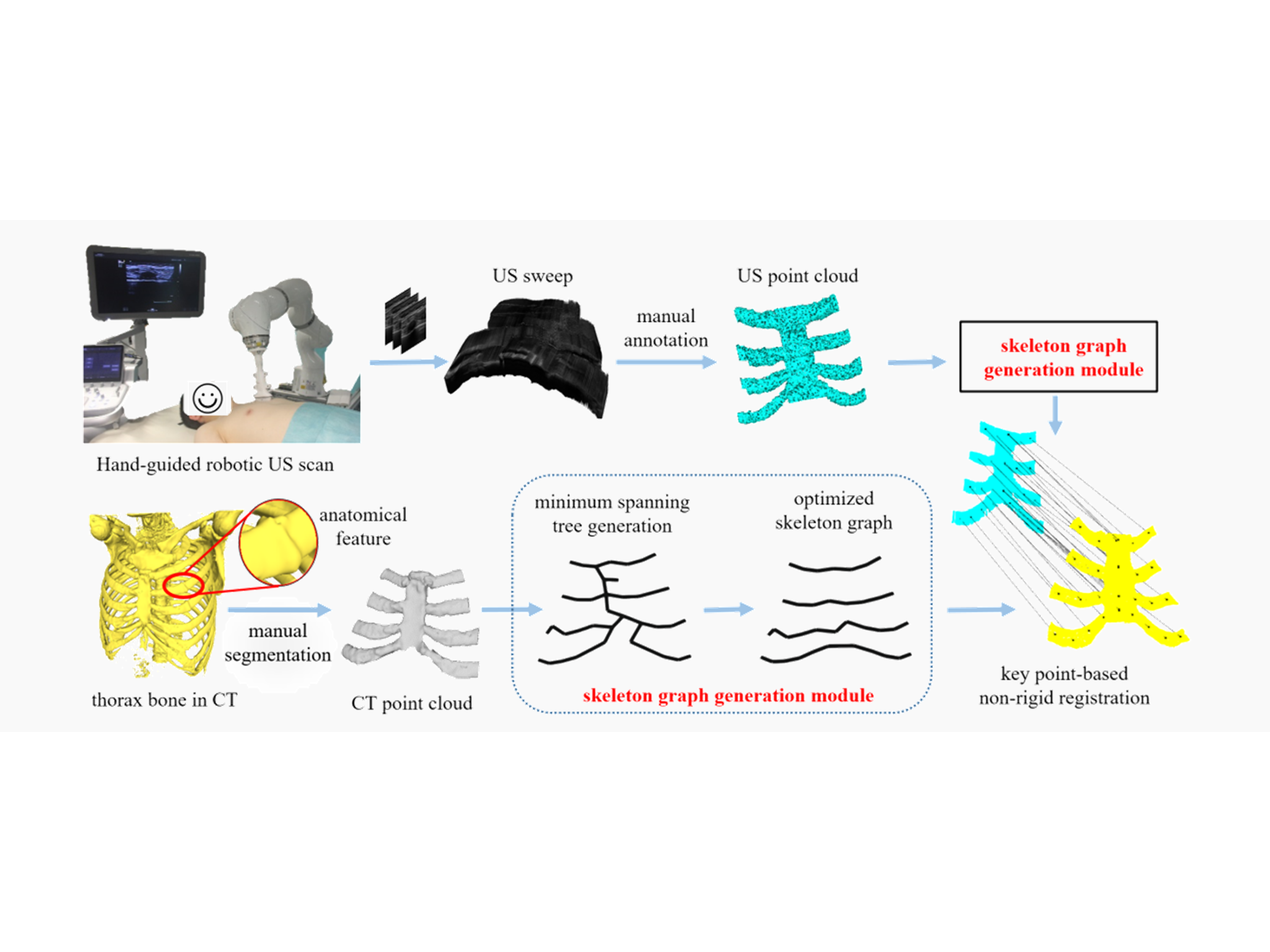
Skeleton graph-based ultrasound-CT non-rigid registration
Zhongliang Jiang†, Xuesong Li, Chenyu Zhang, Yuan Bi, Walter Stechele, Nassir Navab
IEEE Robotics and Automation Letters 2023
A skeleton graph-based approach for non-rigid registration between ultrasound and CT images, enhancing alignment accuracy in medical imaging.